Projects
4 projects

XR-Based Human-Robot Collaboration for Work at Height
Active
This project develops a multipurpose robotic platform and an XR-based human-robot collaboration system for high-risk construction work at height.
View project
Viewpoint Control for Teleoperation in Construction
Completed
This project studies how construction robot operators should view remote workspaces during teleoperation. It compares coupled, decoupled, and hybrid viewpoint control techniques and develops a learning-based model for user-aligned viewpoint transitions.
View project
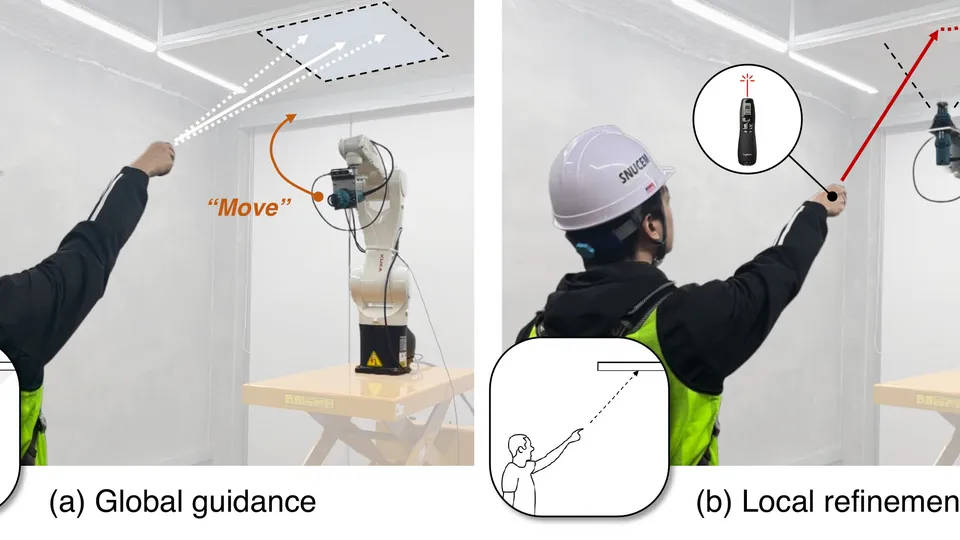
Multimodal Interface for Human-Robot Collaboration in Construction
Completed
This project develops intuitive multimodal interfaces for spatial tasking in construction robotics. By combining deictic gestures, laser pointing, and speech commands, the system enables workers to communicate distant spatial goals to robots without relying on low-level robot control.
View project
