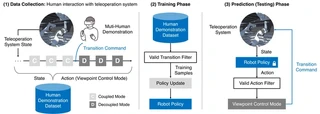
Learning viewpoint control from human-initiated transitions for teleoperation in construction

Hello! I am a fifth-year Ph.D. candidate in the Department of Architecture & Architectural Engineering at Seoul National University. I am fortunate to be advised by Professor Changbum R. Ahn, and I am a member of the Construction Engineering & Management Lab. My research interests include construction robotics, human-robot interaction, and robot learning.
I previously completed both my bachelor’s and master’s degrees in Architectural Engineering at Seoul National University, where I conducted research on modular construction and human-robot interaction under the advisement of Professor Moonseo Park.
I am honored to be a recipient of the Basic Science Research Program (Ph.D. Fellowship) from the National Research Foundation of Korea (NRF).
Currently, I serve as a student coordinator of a joint project funded by the Ministry of Land, Infrastructure and Transport & Ministry of Trade, Industry and Energy, South Korea, on developing a multipurpose robotic platform and XR-based human–robot collaboration system for construction work at height. If you are interested, please visit this page for more details.