🤖 My Robots
Robots I have worked with in my research.
Rainbow Robotics, RB10-1300U

- To be updated
Franka Emika, Panda (virtual)
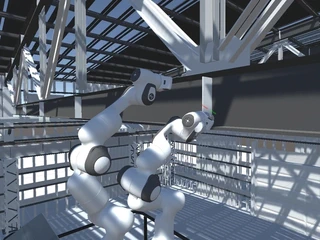
- Description: 7-DoF collaborative robot arm simulated in VR, used as a manipulation arm with a MIG-welding tool and a camera arm with an RGB-D sensor.
- Usage: Used for dynamic viewpoint control for teleoperated robotic welding at height in construction.
KUKA, KR 6 R900 sixx
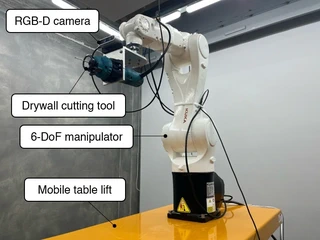
- Description: A 6-DoF industrial manipulator (payload 6 kg, reach 900 mm) equipped with a Makita 3706 drywall cutting tool and an Intel RealSense D435 RGB-D camera, mounted on a mobile lift.
- Usage: Used for precise drywall cutting in human-robot interface studies combining deictic gestures, speech, and dynamic laser pointing.
Yujin Robot, Turtlebot v2
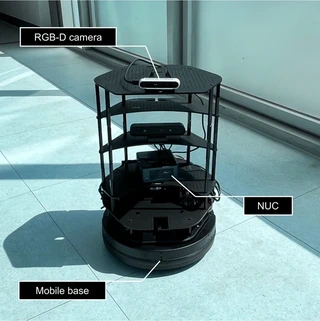
- Description: Kobuki-based mobile platform equipped with an Intel RealSense D435 RGB-D camera and Intel NUC computer running ROS.
- Usage: Used to interpret deictic (pointing) gestures through vision-based 3D human pose estimation in human-robot spatial communication studies in construction.

Hello! I am a fifth-year Ph.D. candidate in the Department of Architecture & Architectural Engineering at Seoul National University. I am fortunate to be advised by Professor Changbum R. Ahn, and I am a member of the Construction Engineering & Management Lab. My research interests include construction robotics, human-robot interaction, and robot learning.
I previously completed both my bachelor’s and master’s degrees in Architectural Engineering at Seoul National University, where I conducted research on modular construction and human-robot interaction under the advisement of Professor Moonseo Park.
I am honored to be a recipient of the Basic Science Research Program (Ph.D. Fellowship) from the National Research Foundation of Korea (NRF).
Currently, I serve as a student coordinator of a joint project funded by the Ministry of Land, Infrastructure and Transport & Ministry of Trade, Industry and Energy, South Korea, on developing a multipurpose robotic platform and XR-based human–robot collaboration system for construction work at height. If you are interested, please visit this page for more details.